
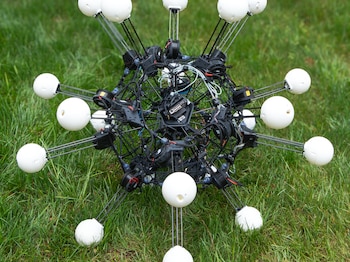
El robot Argus utiliza 20 patas modulares para maximizar su capacidad de moverse en cualquier dirección. (Universidad de Duke)
El mundo de la robótica vuelve a reinventarse con el lanzamiento de Argus, un prototipo desarrollado en la Universidad de Duke que desafía la tendencia de imitar la forma humana. El prototipo está equipado con 20 patas modulares telescópicas dispuestas radialmente, cada una equipada con una cámara de profundidad, para maximizar el rendimiento mediante un movimiento uniforme en todas las direcciones.
En el corazón de la innovación se encuentra la isotropía dinámica, el principio matemático que guía la estructura de Argus. El parámetro mide la capacidad de un robot para moverse y reaccionar con la misma eficacia en cualquier dirección sin estar sesgado hacia una dirección particular, dijeron los investigadores. La mayoría de los robots tradicionales, incluidos los cuadrúpedos y las plataformas humanoides, obtienen una puntuación inferior a 0,6 en esta métrica. El valor de Argus alcanza 0,91, que se acerca al valor máximo teórico.
Esta simetría funcional puede mejorar el seguimiento de trayectorias, la eficiencia energética, la tolerancia a daños, la robustez y la navegación en terrenos complejos. El diseño no prioriza la forma antropomorfa sino la integración de la representación y percepción del cuerpo entero.
 Los investigadores de la Universidad de Duke simularon más de 1.500 modelos antes de seleccionar la estructura del prototipo final. (Universidad de Duke)
Los investigadores de la Universidad de Duke simularon más de 1.500 modelos antes de seleccionar la estructura del prototipo final. (Universidad de Duke)
Cada pata telescópica está equipada con una cámara de profundidad, dispuesta en una geometría dodecaédrica regular. Esta estructura consta de 12 caras pentagonales que distribuyen uniformemente las fuerzas y el campo de visión, lo que da como resultado un campo de visión constante y una aceleración equilibrada en cualquier entorno.
La demostración de Argus representa un cambio en el concepto de robots. El prototipo no tiene ni parte delantera ni trasera definida, lo que elimina la necesidad de operaciones de reorientación y facilita el movimiento en espacios complejos. Independientemente de la orientación, el robot puede moverse y estabilizarse eficazmente en arena, hierba, hormigón, superficies mojadas y senderos forestales.
En experimentos realizados en el campus, Argus superó obstáculos de hasta cinco pulgadas (12,7 centímetros) y se mantuvo móvil incluso con la pérdida de tres piernas. El sistema exhibe tolerancia a fallas y resiliencia después de haber sido impactado. Además, el robot puede soportar una carga útil de 4,5 kg (10 lb) casi a máxima velocidad y mantener el equilibrio y la tracción en diferentes terrenos.
 Incluso si varias de las piernas de Argus sufrieran daños en entornos de la vida real, permanecería móvil y equilibrado. (Universidad de Duke)
Incluso si varias de las piernas de Argus sufrieran daños en entornos de la vida real, permanecería móvil y equilibrado. (Universidad de Duke)
Argus es capaz de escalar paredes verticales alternando apoyo y empuje entre subconjuntos de sus 20 patas, una habilidad poco común entre los robots terrestres. También es capaz de rastrear e impulsar objetos grandes mientras gira, demostrando coordinación entre percepción y movimiento incluso en condiciones cambiantes.
Todas estas habilidades se entrenaron primero en simulaciones digitales, y el equipo de investigación exploró más de 1.500 configuraciones morfológicas antes de seleccionar el mejor diseño. La transferencia de estos comportamientos a entornos del mundo real resalta la solidez del marco de diseño matemático y la adaptabilidad de la plataforma.
 El concepto de simetría dinámica aplicado por Argus abre nuevas posibilidades para el desarrollo de robots no antropomórficos. (Universidad de Duke)
El concepto de simetría dinámica aplicado por Argus abre nuevas posibilidades para el desarrollo de robots no antropomórficos. (Universidad de Duke)
La relevancia del Proyecto Argus va más allá de un único prototipo. El principio de simetría dinámica proporciona un marco unificador para evaluar y diseñar cualquier tipo de sistema robótico, alejándose del paradigma del mimetismo biológico. Este enfoque basado en simulación a gran escala permite a otros equipos explorar el espacio de diseño y comparar cuantitativamente el rendimiento de diferentes morfologías.
El objetivo es más que simplemente la obediencia mecánica, explicó el líder del programa Boyuan Chen en una declaración de Duke: «No queremos sólo que los robots sigan instrucciones. Queremos que los robots nos ayuden a aprender cosas sobre el mundo que no podemos aprender de otra manera, y a veces eso significa encontrar el cuerpo adecuado para resolver el problema en primer lugar».
El caso Argus plantea una pregunta sobre el futuro de la robótica: ¿la eficiencia y la adaptabilidad requerirán renunciar a la forma humana? Esta investigación abre ahora un nuevo capítulo en el diseño de máquinas, centrándose en el equilibrio entre funcionalidad y apariencia.





{kind=link}